
笔记 | 系统模型、分析与控制
一、控制系统介绍
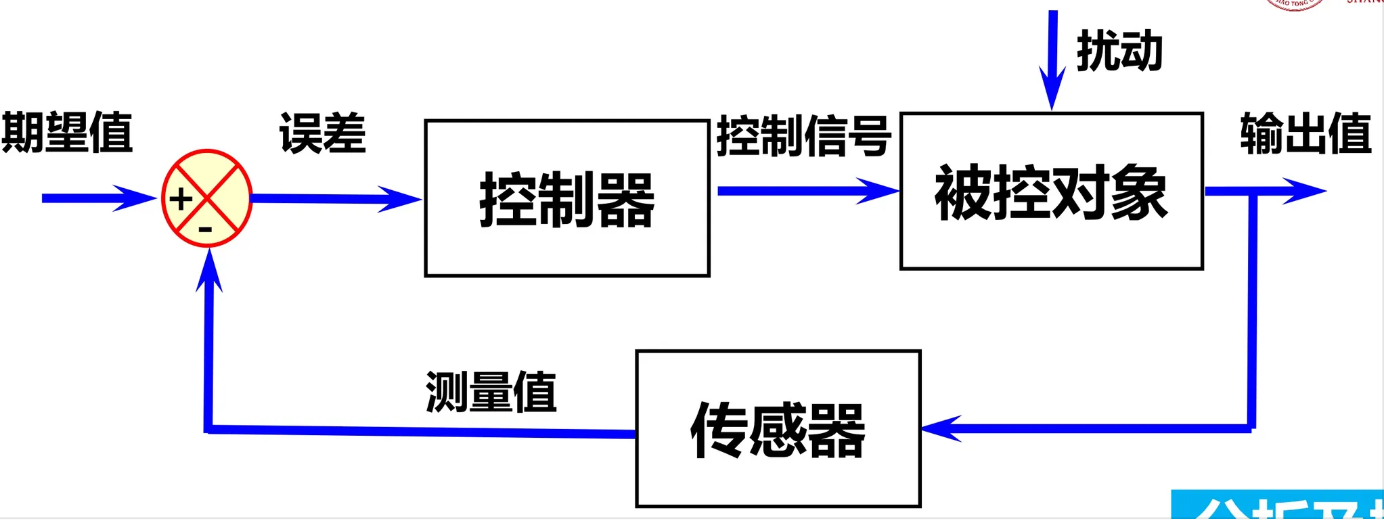
- 闭环控制的主要特点:1. 检测偏差;2.根据偏差调整控制量,从而减小或消除偏差
- 被控对象、被控变量、控制信号、过程、扰动、反馈控制
- 开环控制的优缺点
- 闭环控制的优缺点
- 考点:判断某系统是否是反馈控制系统
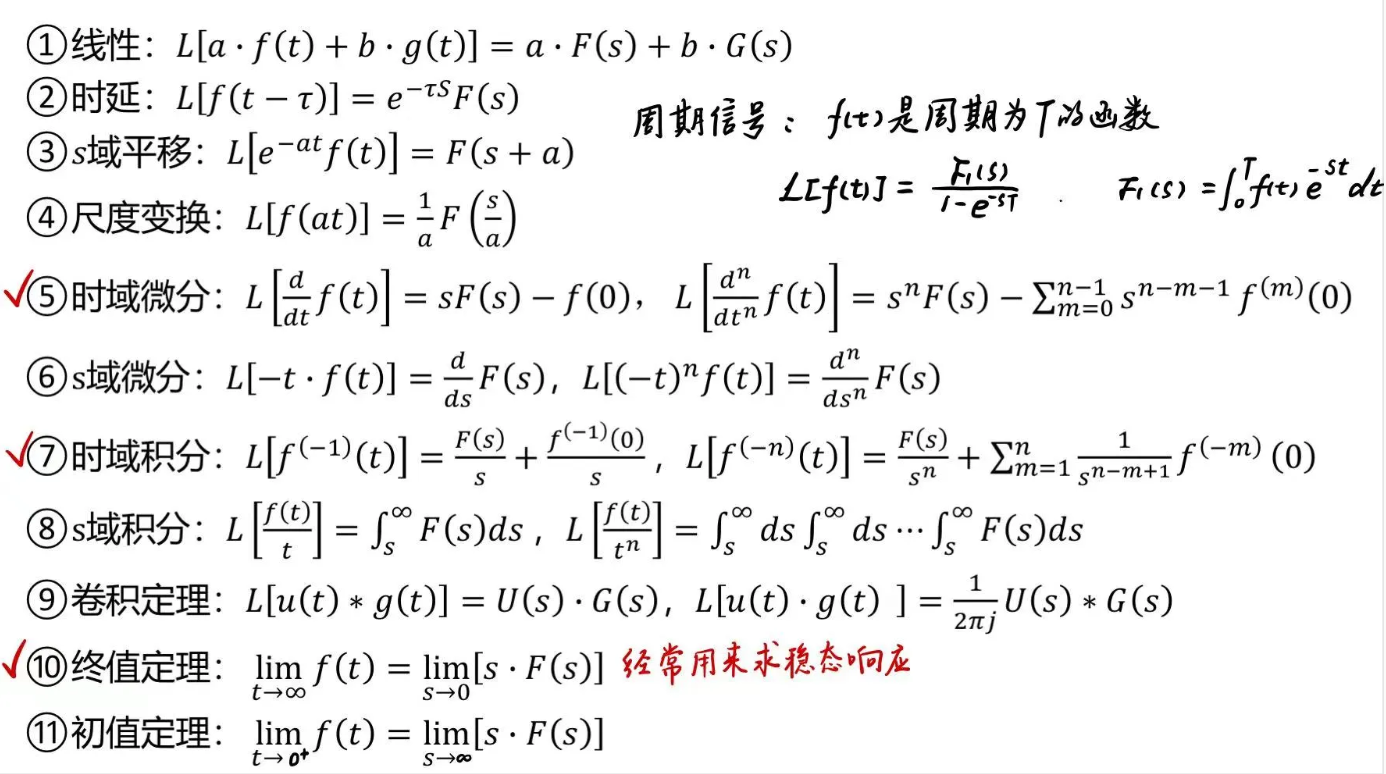
二、Laplace变换
会用公式就行
三、机械和电气系统建模
质量-弹簧-阻尼系统
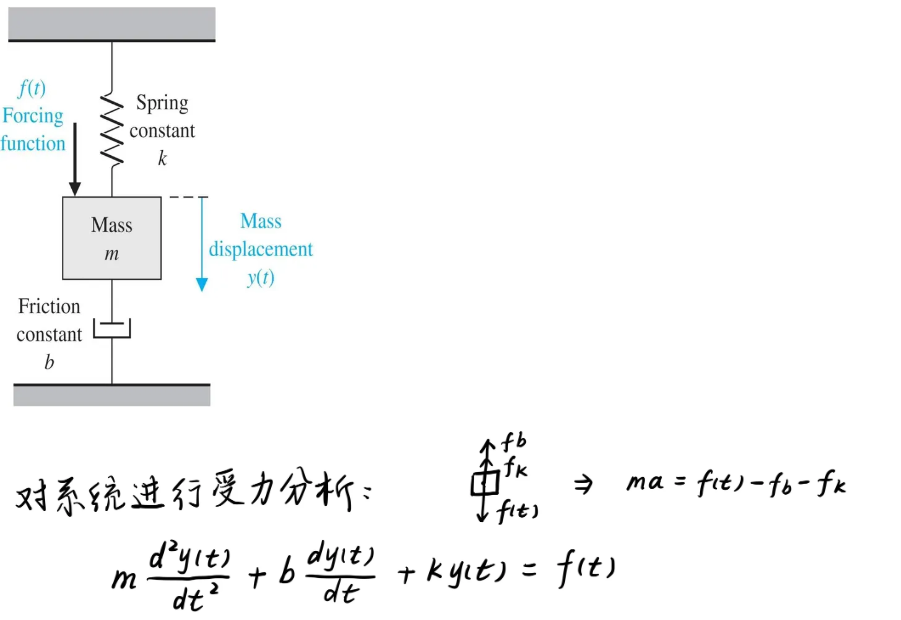
为什么不考虑重力(没有mg项):因为是以静止状态下的平衡工作点(无外部输入)作为零点,此时重力已经被弹簧的拉力平衡掉了
其他的机械系统可以用同样的方法进行分析
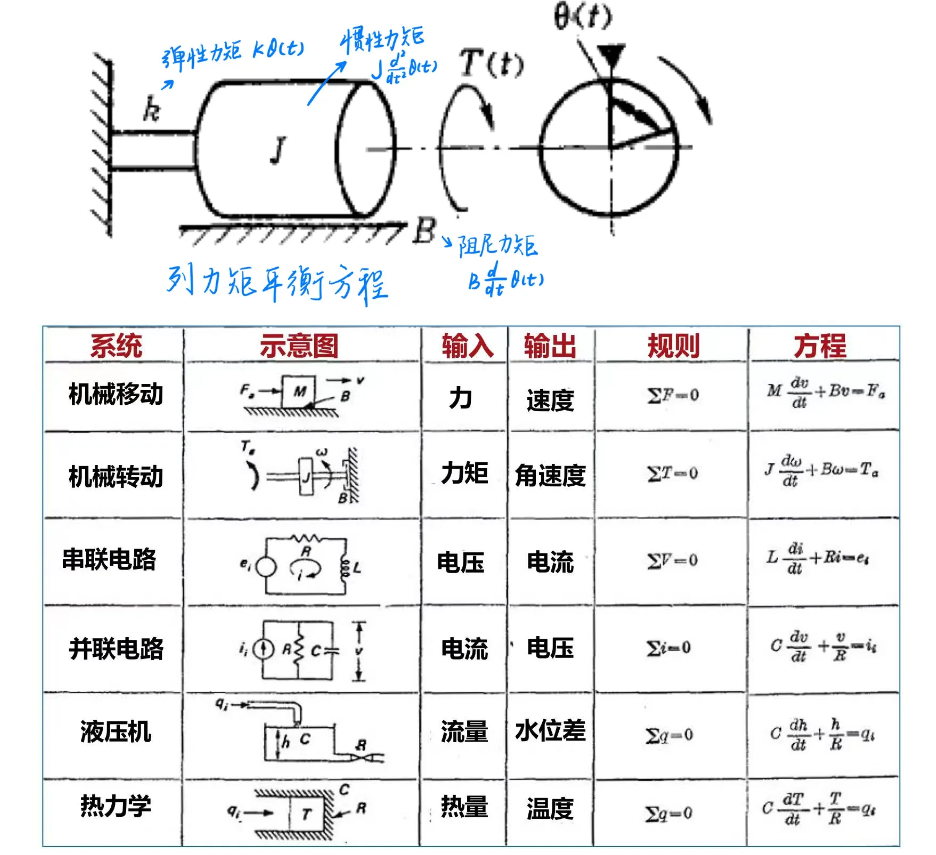
机械传动系统:平动-转动系统、齿轮传动系统
电气系统
电阻:$u(t)=Ri(t)$
电容:$u(t)=\frac{1}{C}\int i(t)dt$ 或 $i(t)=C\frac{\mathrm{d} u(t)}{\mathrm{d} t}$
电感:$u(t)=\frac{1}{C}\frac{\mathrm{d} i(t)}{\mathrm{d} t}$
列KCL、KVL方程求解
复阻抗法:
电阻:$Z=R$
电容:$Z=\frac{1}{Cs}$
电感:$Z=Ls$
运放:虚短、虚断
微分方程的阶数由独立储能元件个数决定
四、传递函数
传递函数$G(s)$:线性定常系统、初值为0、单数单输出,输出的Laplace变换$Y(s)$与输入的Laplace变换$U(s)$的比值
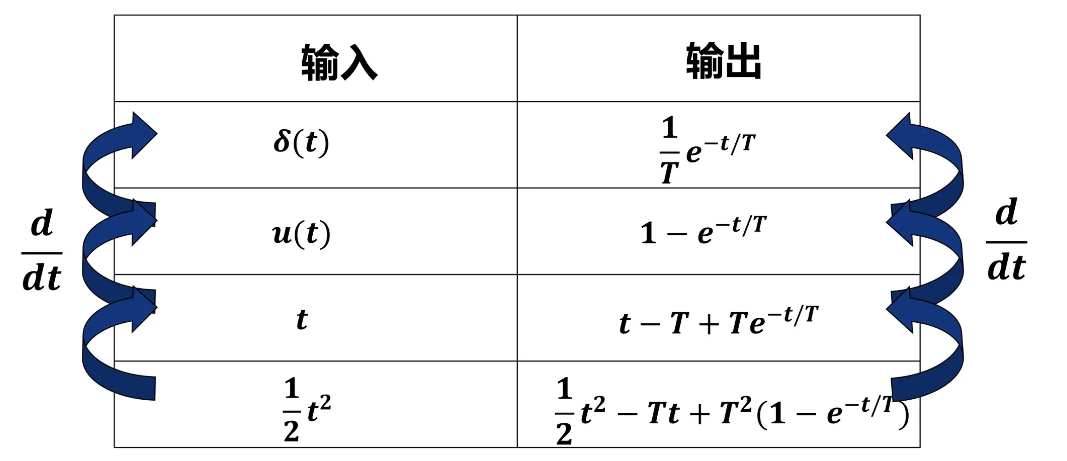
单位脉冲输入$δ(t)$,传递函数就是输出的Laplace变换:$G(s)=Y(s)$
对输入求导,输出也会求相应的导数
已知输入为单位斜坡响应$u(t)=t$时的输出$y(t)$,则传递函数为$y’’(t)$
一阶系统:
典型传递函数:
- 比例/放大环节 $G(s)=K$
- 积分环节 $G(s)=\frac{1}{s}$(若输入突然除去,积分停止,输出维持不变)
- 微分环节 $G(s)=s$
- 惯性环节 $G(s)=\frac{1}{Ts+1}$
- 一阶微分环节 $G(s)=Ts+1$
- 二阶振荡环节 $G(s)=\frac{1}{T^2s^2+2ζTs+1}$
- 二阶微分环节 $G(s)=T^2s^2+2ζTs+1$
- 延迟环节 $G(s)=e^{-\tau s}$
五、方框图
方框图的简化
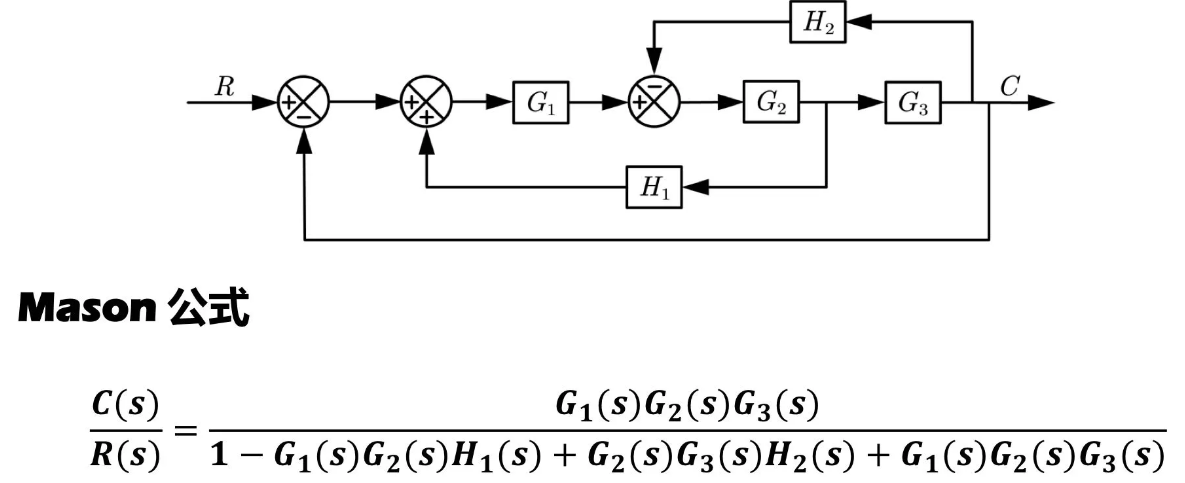
简单版Mason公式:适用于有一条前向通路的系统
几个定义
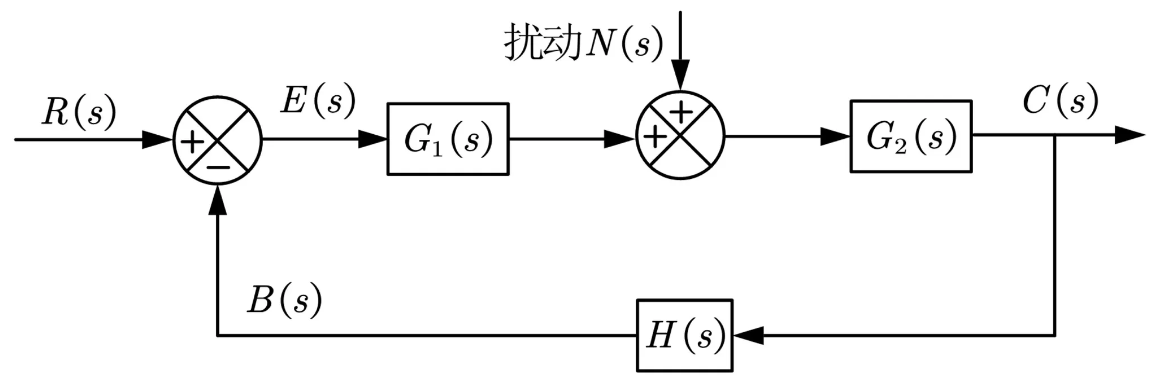
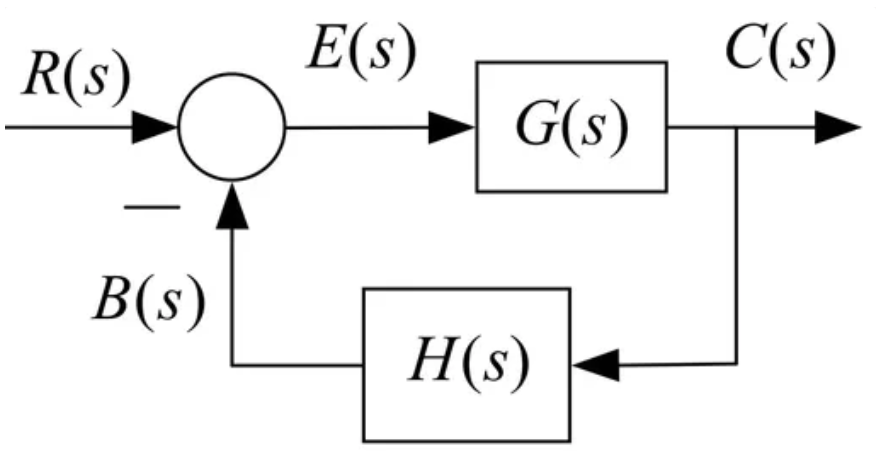
前向通路:$R(s)$到$B(s)$
反馈通路:$C(s)$到$B(s)$
闭环传递函数:$\frac{C(s)}{R(s)}=\frac{G_1G_2}{1+G_1G_2H}$
开环传递函数:反馈通路末端断开 $\frac{B(s)}{E(s)}=G_1G_2H$
前向传递函数:$\frac{C(S)}{E(s)}=G_1G_2$
误差传递函数
:以$E(s)$为输出,以$R(s)$或$N(s)$为输入的闭环传递函数
- $\frac{E(s)}{R(s)}=\frac{1}{1+G_1G_2H}$ 与开环传递函数有关
- $\frac{E(s)}{N(s)}=\frac{-G_2H}{1+G_1G_2H}$
输入$R(s)$和扰动$N(s)$同时作用时的输出
- 只考虑输入$R(s)$,则 $C(s)=\frac{G_1G_2}{1+G_1G_2H}R(s)$
- 只考虑$N(s)$,则 $C(s)=\frac{G_2}{1+G_1G_2H}N(s)$
- 同时考虑两者$C(s)=\frac{G_1G_2}{1+G_1G_2H}R(s)+\frac{G_2}{1+G_1G_2H}N(s)$
可以发现系统的闭环传递函数(反馈通路没有断开)的分母均为$1+G_1G_2H$(系统的特征多项式),这说明
- 不管外作用加在系统的哪一个位置($R(s)$处还是$N(s)$处,或者其他位置),系统都有着相同的特征多项式,系统闭环传递函数都有着相同的极点,这是系统的一种固有特性
六、信号流图
几个定义
- 前向通路:从输入节点到输出节点,通过任一节点不多于一次的通路
- 回路:起点和终点重回,通过任一节点不多于一次
- 不接触回路:相互间没有任何公共节点的回路
- 增益:所在路径上所有传播(传递函数)的乘积
根据系统方程绘制信号流图
根据方框图绘制信号流图
节点的选取:一般取输入、输出、加法器后(支路汇总的地方)、出现分支的地方 作为节点
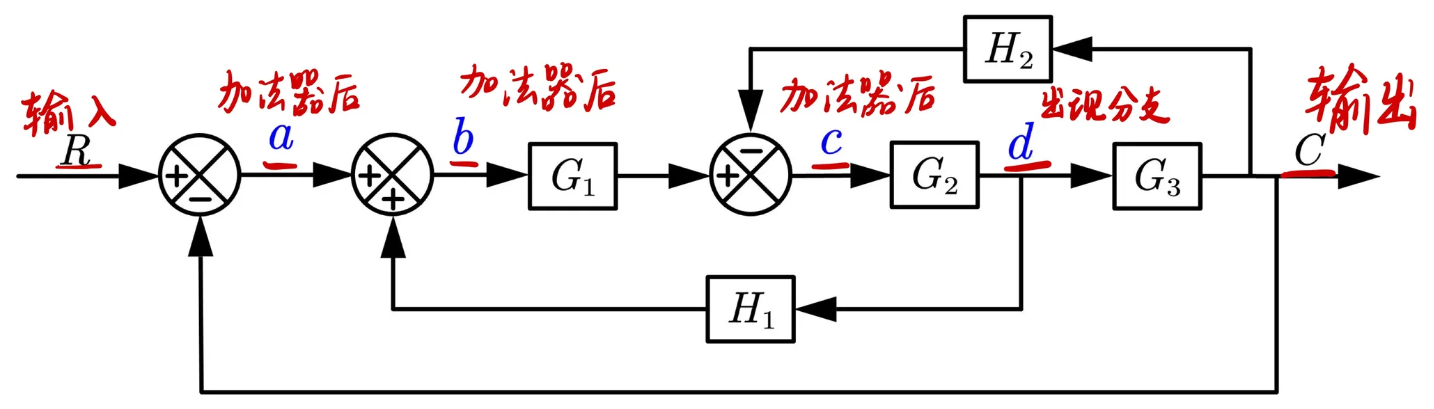
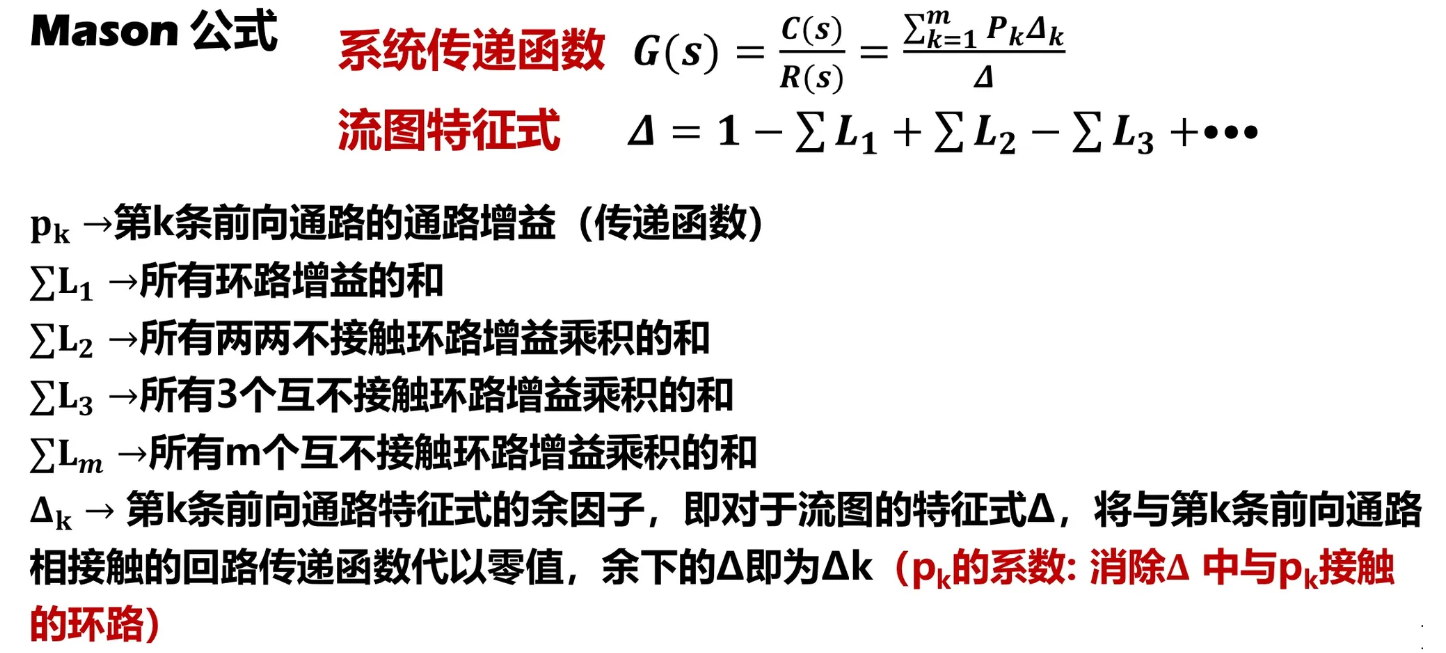
Mason公式:找对通路、回路后套公式
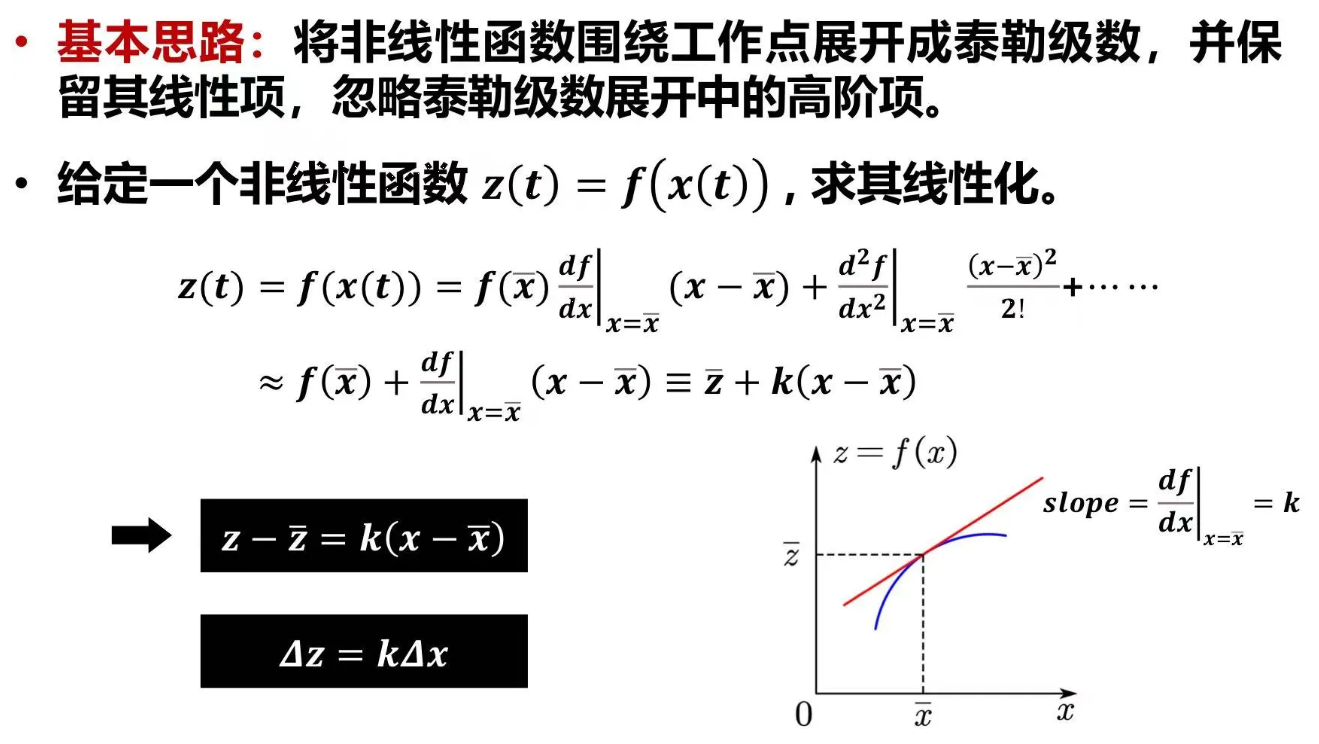
七、线性化
输出和输入的关系不是线性关系时,可将非线性函数在平衡点附近线性化
八、时域分析
总结:
- 典型输入信号有哪些
- 一阶系统、二阶系统在这些典型输入信号下会有怎样的输出(瞬态响应、稳态响应)
- 高阶系统的响应受哪些因素影响:零点、极点
- 怎样评价一个系统的性能好坏(稳准快)
- 稳态性能指标:稳态误差
- 瞬态性能指标:$t_r$、$t_p$ 、$M_p$ 、$t_s$、$t_d$
- 这些性能和传递函数的零点极点有什么样的关联
- 什么样的系统是稳定的:BIBO,极点
- 怎样判断一个系统是否稳定:劳斯稳定判据
- 对于一个稳定的系统,如何求其稳态误差
- 怎样提高系统的性能:PID控制
典型输入信号:
- 阶跃信号
- 斜坡信号
- 抛物线函数
- 脉冲信号
- 正弦信号
瞬态响应:初始状态到稳态的响应过程
稳态响应:$t→∞$时,系统的输出
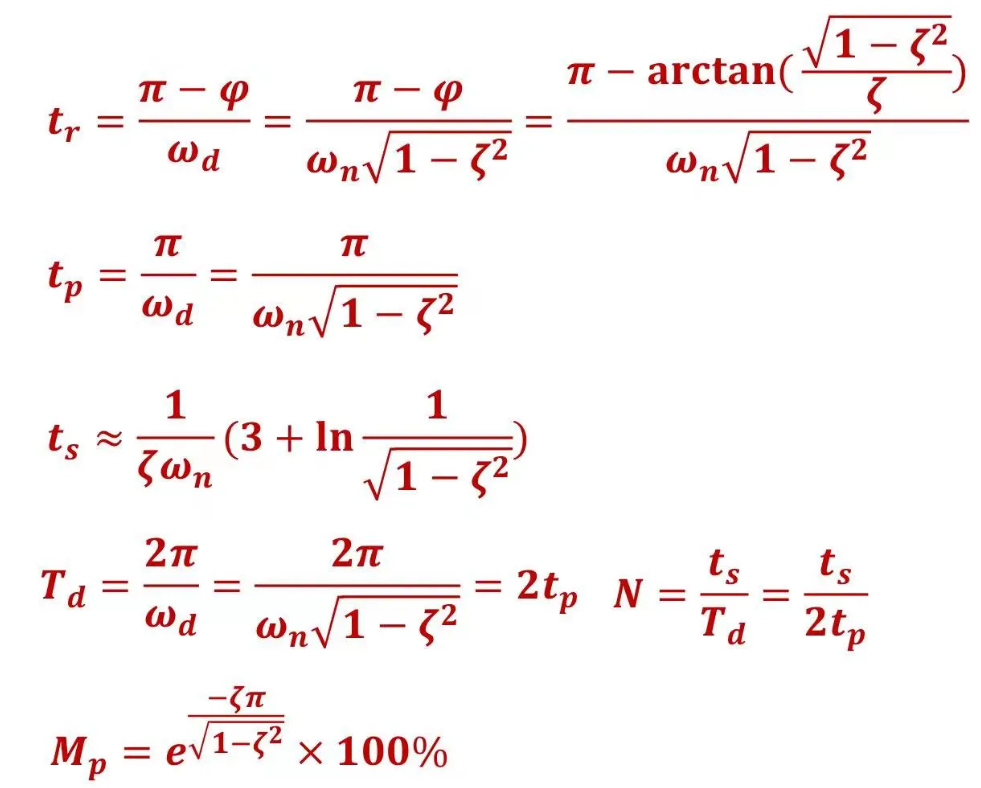
瞬态性能:
- $t_r$ 上升时间(rise time):有超调时为第一次到稳态所需时间;没有超调时为从稳态的10%上升到90%所需时间(快速性)
- $t_p$ 峰值时间(peak time):上升至第一个峰值所需时间(快速性)
- $t_s$ 调整时间(settling time):到达并保持在允许误差范围内所需时间(快速性)
- $t_d$ 延时时间(delay time):到达稳态$50\%$所需时间(快速性)
- $M_p$ 最大超调量:$\frac{c(t_p)-c(\infty)}{c(\infty)}\times100\%$(平稳性)
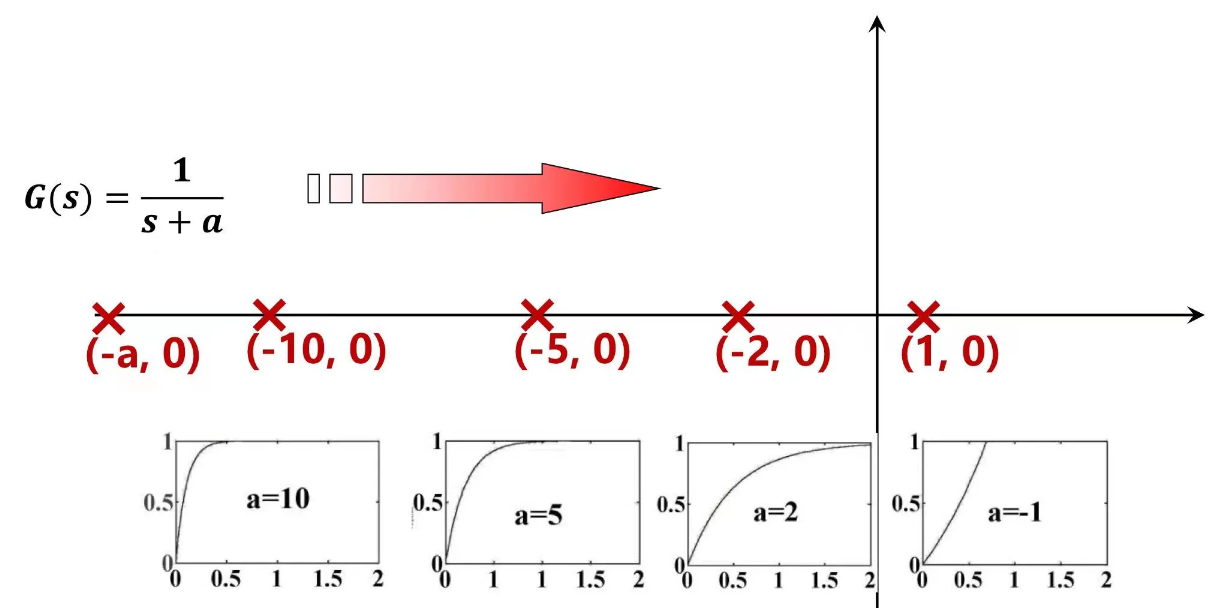
一阶系统:
传递函数 $G(s)=\frac{1}{Ts+1}$
极点:$s=-\frac{1}{T}$
单位阶跃响应:
输出 $c(t)=1-e^{-\frac{t}{T}}$
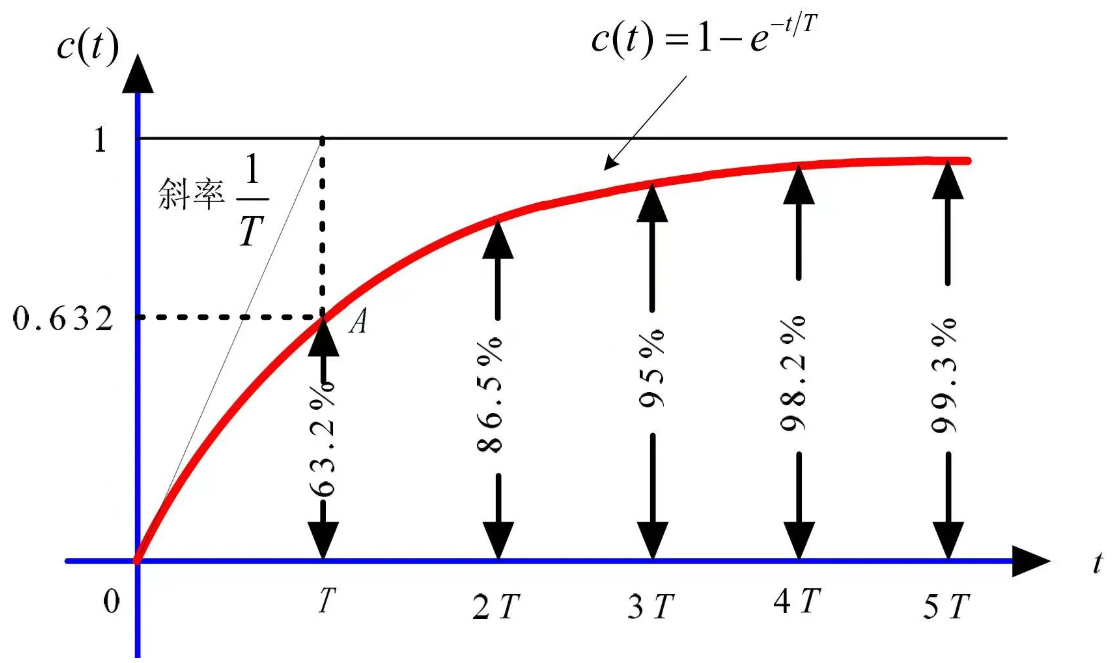
$t_s=3T$(5%误差) $t_s=4T$(2%误差)
T越大,极点离虚轴越近,响应越慢
单位脉冲响应、单位斜坡响应、单位加速度响应
二阶系统
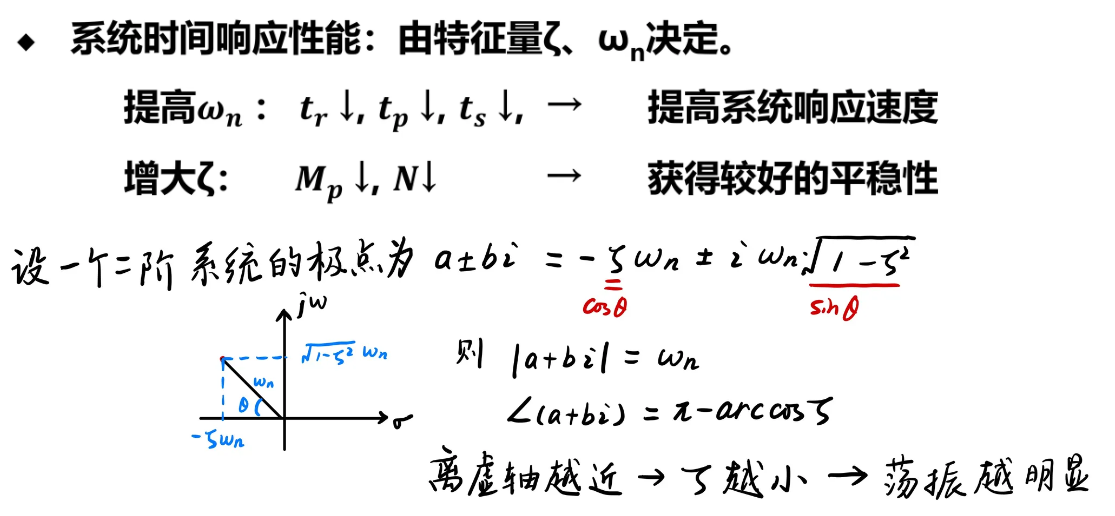
传递函数$G(s)=\frac{\omega_n^{2}}{s^2+2\zeta\omega_n^2S+\omega_n^2}$
$\zeta$:阻尼比 $\omega_n$:固有频率(无阻尼自然频率)
极点:$s_1,s_2=-\zeta\omega_n\pm\omega_n\sqrt{\zeta^2-1}$
过阻尼($\zeta>1$)
极点为两个不等负实根
$t_s=3\times\frac{1}{(\zeta-\sqrt{\zeta^2-1})\omega_n}$(5%误差) $t_s=4\times\frac{1}{(\zeta-\sqrt{\zeta^2-1})\omega_n}$(2%误差)
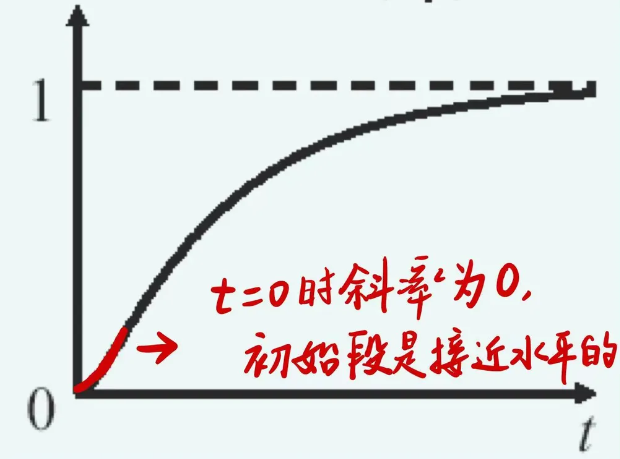
临界阻尼($\zeta=1$)
极点为两个相等实根
输出 $c(t)=1-e^{-\omega_nt}(1+\omega_nt)$
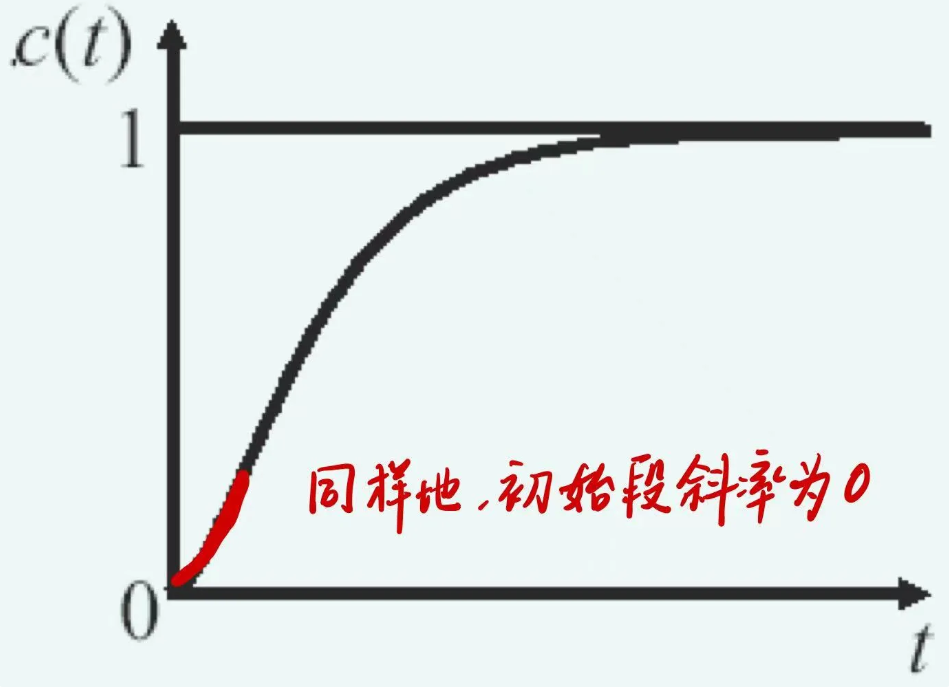
斜率最大的时刻:$t=\frac{1}{\omega_n}$
调整时间:到达稳态值95%,$t_s=\frac{4.7}{\omega_n}$
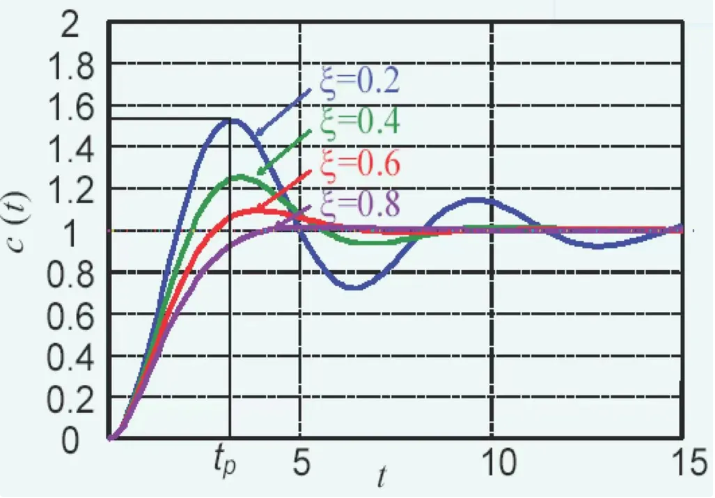
欠阻尼($0<\zeta<1$)
一对共轭复数极点
$c(t)=1-\frac{e^{-\zeta\omega_nt}}{\sqrt{1-\zeta^2}}\sin{\omega_dt}$
有阻尼振荡频率 $\omega_d=\omega_n\sqrt{1-\zeta^2}$
振荡周期$T_d=\frac{2\pi}{\omega_d}$
无阻尼($\zeta=0$)
- 一对纯虚极点
- $c(t)=1-\cos{\omega_nt}$
高阶系统:
- 可以只考虑主导极点的影响
- 主导极点:距离虚轴最近的极点、附近没有零点、其他极点到虚轴的距离是这对极点到虚轴距离的五倍以上
- 零点的影响:减小系统阻尼 $\zeta$,且越靠近虚轴,影响越明显
- 极点的影响:增大系统阻尼,越靠近虚轴越明显
- 若零点与极点距离很近,则他们的作用会相互抵消,对响应的影响可以忽略不计
系统稳定充要条件:特征方程的所有根都在s平面左半平面(实部为负,则 e 指数为负,瞬态响应可以衰减到 0,不会发生指数爆炸)
劳斯判据:
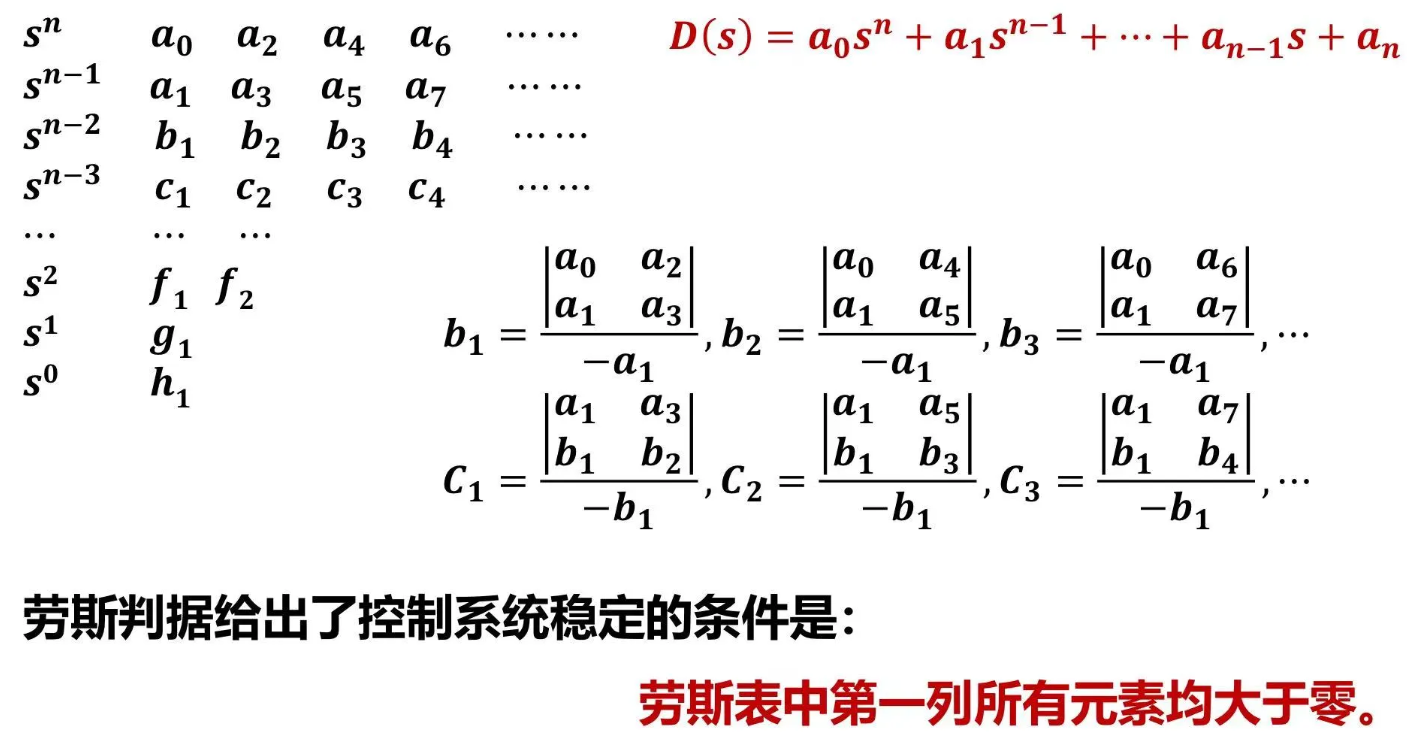
不稳定根(右半平面根)的个数:第一列参数符号变化的次数
存在一行的第一列元素为零:用 $\varepsilon$ 代替0,计算上下行符号有无变化,若不变化,则有一对虚根,若变化,则存在右半平面不稳定根
存在全零行:用辅助多项式(上一行的多项式)求得根
稳定裕量
$\delta$:所有根均位于$-\delta$的左侧
- 要判断$s$和$-\delta$的关系,所以可以令$s_1=s+\delta$,转换成判断$s_1$和 $0$ 的关系,再使用劳斯判据
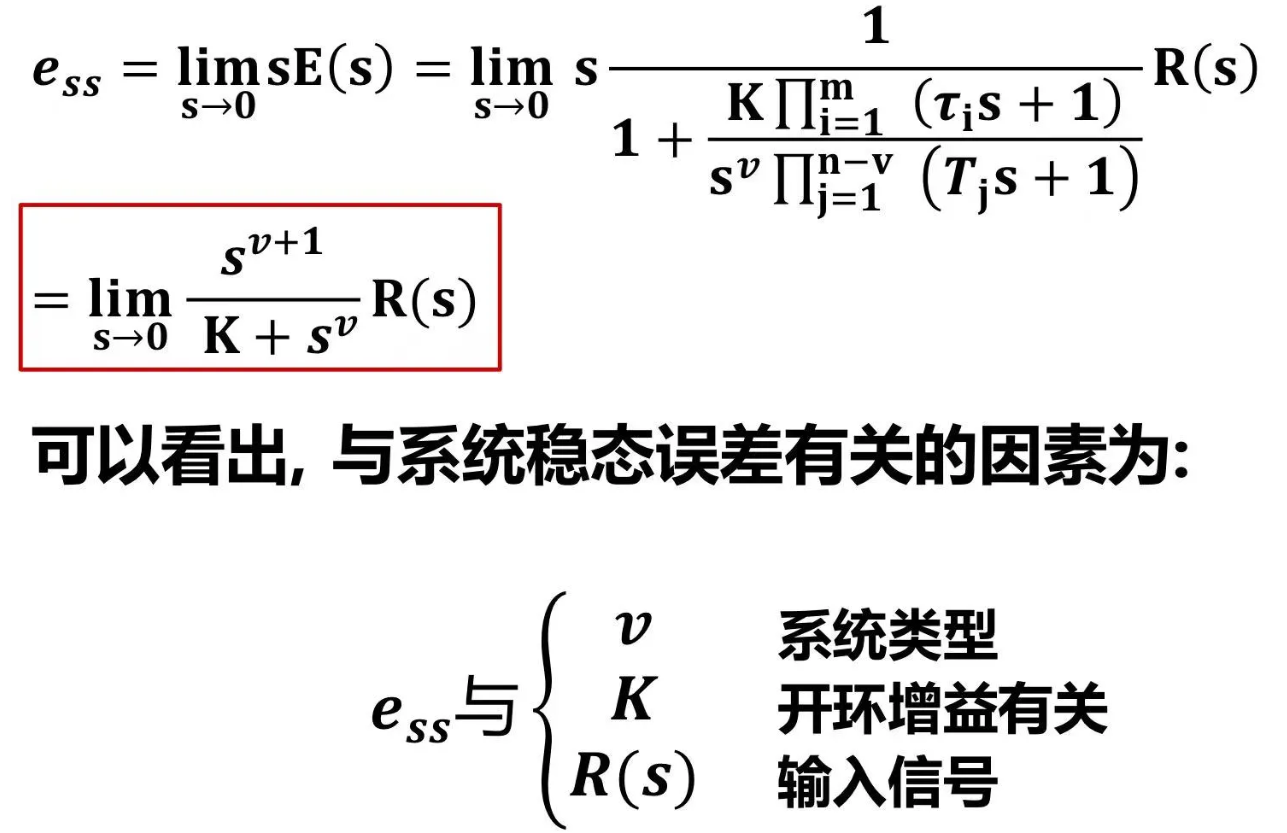
稳态误差:
利用Laplace变换的终值定理求解
$t→\infty$时的误差
对于一个简单反馈系统
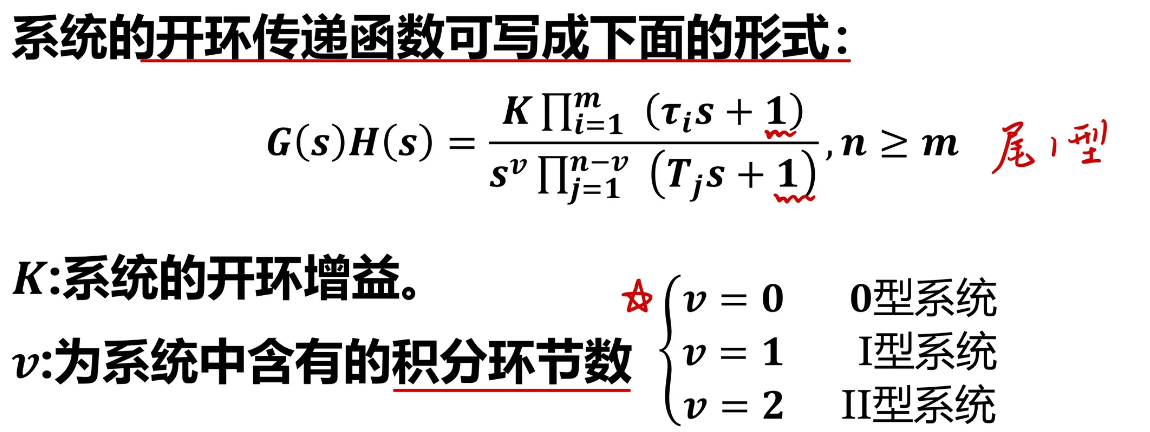
与开环传递函数有关
0型系统、Ⅰ型系统、Ⅱ型系统……
稳态误差受哪些因素影响
静态位置误差系数$K_p$:输入为单位阶跃时的稳态误差系数(上式中K的值)
静态速度误差系数$K_v$:输入为单位斜坡时的稳态误差系数
静态加速度误差系数$K_a$:输入为单位加速度时的稳态误差系数
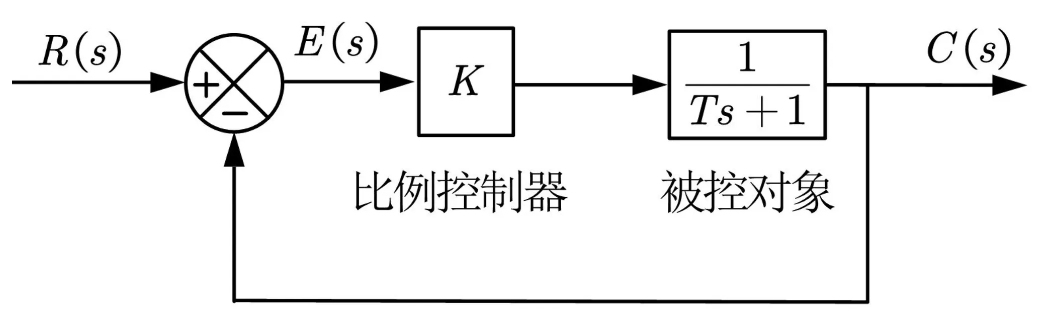
PID控制
比例控制(Proportional):将误差乘以一个系数,再让系统对经比例控制后的误差进行反应
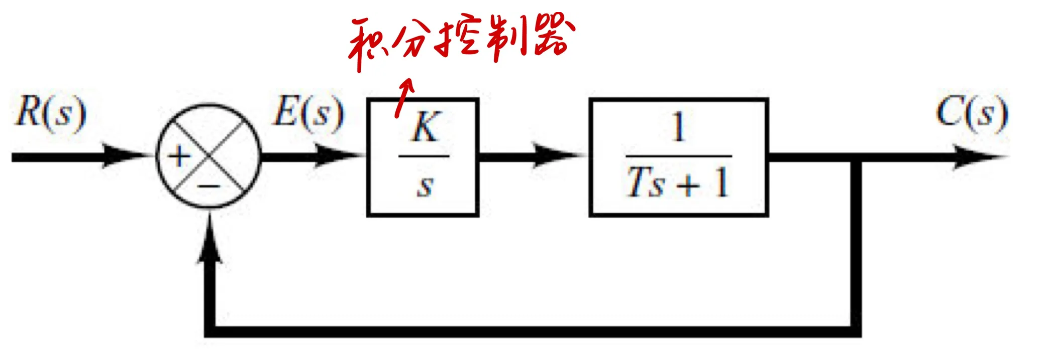
积分控制(Integral):考虑过去误差的累积量,再让系统对这个累积量进行反应
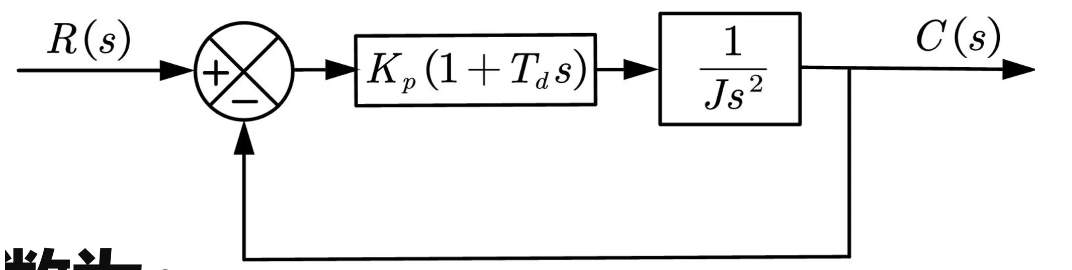
微分控制(Differential):考虑将来的误差,计算误差的一阶导,从而对未来的误差进行预测
$\zeta$越大,振幅衰减越快,震荡周期越长(阻力大)
九、频域分析
- 频域分析:根据系统的开环频率特性判断闭环系统的性能
- 频率响应:系统对正弦信号的稳态响应
